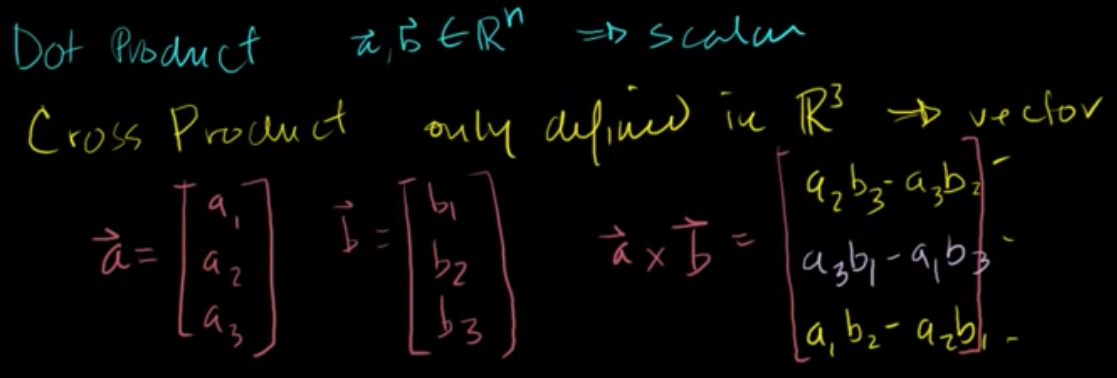
The Cross Product is much more limited than Dot Product. Where the dot product is defined in any dimension ( RN ), the cross product is only defined in 3d ( R3 ).
The dot product returns a scalar; the cross product a Vector.
For first row in the returned vector, you ignore the top row and take a2⋅b3−a3⋅b2
For the 2nd row in the returned vector, you ignore the middle row of the vectors and take a similar product to the first; however, this time, you are doing it the opposite way around: a3⋅b1−a1⋅b3
For the 3rd row, you ignore the last row of input and make the same operation as the first row of the top 2 rows of input: a1⋅b2−a2⋅b1.
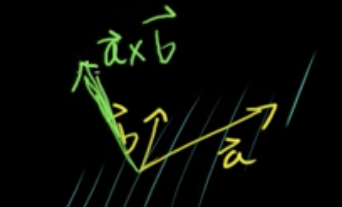
The vector that's returned is orthogonal to both a and b.
Note that two vectors are orthogonal to those vectors. To find which direction it points in, you use the right-hand rule: take your right hand and put your index finger in the direction of a and your middle finger in the direction of b, where your thumb is pointing in the direction of the returned vector.
What does orthogonal mean in this context? It means if a⋅b=0, the difference between orthogonal vectors and perpendicular vectors is orthogonal could also apply to 0 vectors.
You can prove it works by taking the dot product with one of the input vectors and the output vector: